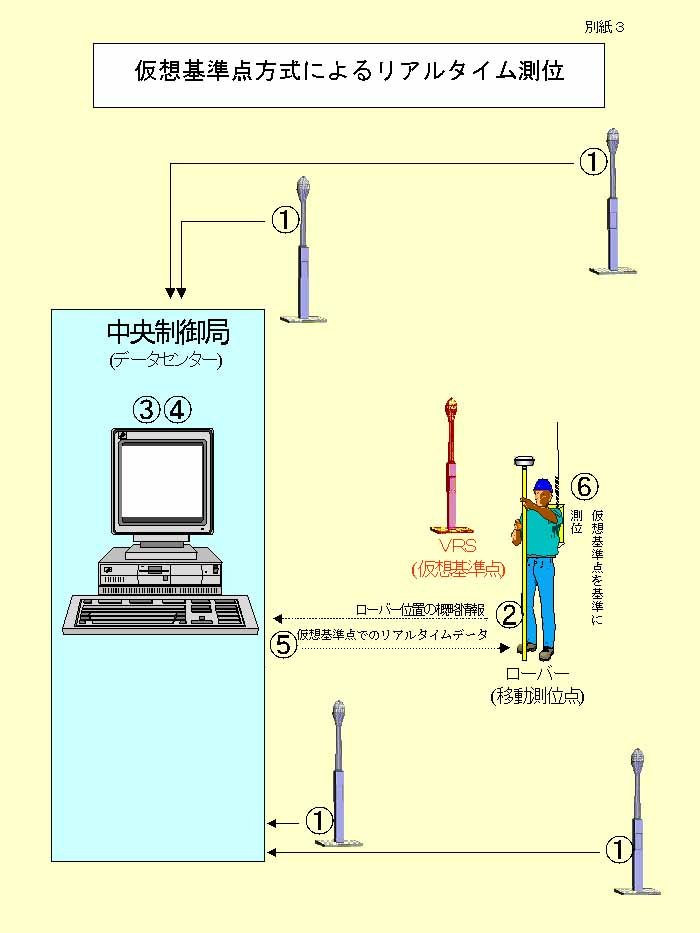
【別紙3】仮想基準点方式によるリアルタイム測位の原理
| [1] | 電子基準点のリアルタイムデータは中央制御局(データセンター)において、リアルタイムに配信されている。 |
| [2] | ローバー(移動測位点)から携帯電話等で、中央制御局にアクセスし、ローバーの概略の位置を伝送する。 |
| [3] | 中央制御局は、ローバーの測位に利用可能な3点以上の電子基準点を決定する。 |
| [4] | 中央制御局で決定した電子基準点の位置と位相データから、ローバーの近くに仮想の基準点を設置し、仮想基準点で観測されるであろう位相データを生成する。 |
| [5] | 中央制御局からローバーに仮想基準点の位置、生成された位相データを携帯電話等で伝送する。 |
| [6] | ローバーは、中央制御局から伝送された仮想基準点の位置、位相データ及びGPS衛星から受信した位相データを用いて位置を決定する。 |