
Sumatra Earthquake and Indian Ocean Tsunami in 2004
Detection of Ground Displacement by Kinematic GPS and its Application to Tsunami ForecastAt World Conference on Disaster Reduction in Kobe (18-22 January 2005), GSI presented the technical proposal for Tsunami Forecast by the aplicatioin of satellite positioning technology, as followings;
Fault Slip and Tsunami EarthquakeThe cause of tsunami is crustal deformation due to fault slip of earthquakes in the sea. Though the crustal deformation can be usually estimated from data analyses of seismic waves, slow slip on faults makes it difficult to estimate the deformation precisely because it radiates small seismic waves. Slow slip on faults which makes large tsunamis and small seismic waves is called as “Tsunami earthquake”. A typical example is an earthquake which killed 22000 people by tsunamis in the Sanriku coast, northern Japan in 1896.
In case of the M9.0 Sumatra-Andaman islands earthquake which occurred on December 26, 2004, some researchers pointed out that slow slip in the northern part of the faults resulted in large tsunami. (cf. Yagi, 2004; http://iisee.kenken.go.jp/staff/yagi/eq/Sumatra2004/Sumatra2004.html) Tsunamis by tsunami earthquakes may cause serious damages in coastal regions because the people are not aware of an earthquake and a subsequent tsunami owing to small ground motions. It, therefore, is very important for mitigation of tsunami disasters to estimate fault slips of earthquakes precisely and to detect tsunami earthquakes. Real-time Monitoring of Ground Movement by Kinematic GPS and its Contribution to Tsunami ForecastSeismometers and accelerometers measure ground velocity and acceleration, respectively. They are very sensitive to short-period seismic waves but less sensitive to longer-period ones. Contrast to them, GPS measures ground displacement in short- and long-period components, even in DC one. GPS is never saturated and measures the displacement in wide frequencies and dynamic ranges. The larger earthquakes occurred, the longer period seismic waves are radiated. Large events should demonstrate advantages of kinematic GPS as a sensor monitoring the ground motion.
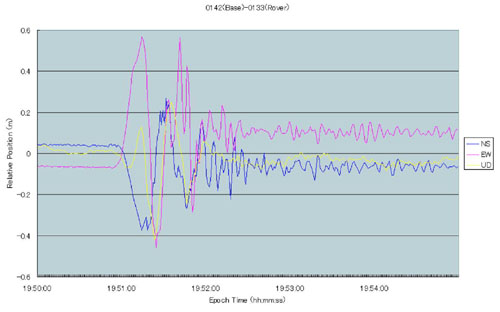 Figure 1. Ground displacement of the 2003 M8.0 Tokachi-Oki earthquake on September 26, 2003 observed by kinematic GPS with 1Hz sampling. It clearly shows static crustal displacements (offsets between 19:50 and 19:52) as well as long-period seismic waves. The Geographical Survey Institute (GSI) is operating the GEONET consisting of 1200 continuos GPS stations in Japan. GEONET GPS data with 1 second sampling are transmitting to the analysis center of the GSI in real time. And the GSI constructed a system to analyze the transmitted data and to monitor the ground displacement in real time. Figure 1 shows ground movements of the M8.0 interplate earthquake in the subduction zone off the Tokachi region, Hokkaido, northern Japan on September 26, 2003 (The 2003 Tokachi-Oki earthquake). It clearly shows the DC offset as well as seismic waves. It suggests that kinematic GPS can measure long-period components of the ground motion precisely, compared with that measured by accelerometers (K-net) with numerical integration (Figure 2). The GSI estimated fault models from the observed displacement and published them in public. 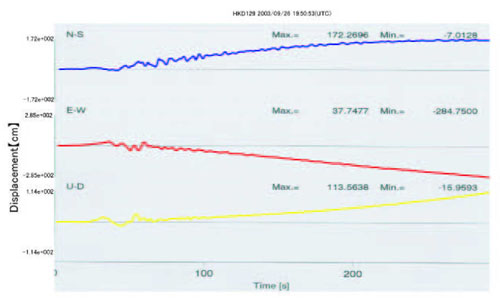 Figure 2. Ground displacement of the 2003 M8.0 Tokachi-Oki earthquake on September 26, 2003 observed by strong motion accelerometers (K-net, data by the National Research Institute for Earth Science and Disaster Prevention) with numerical integration. Small sensitivity for long-period components causes unreal drift in the data and makes it difficult to detect static crustal displacements. Constructing continuous GPS networks with high-rate sampling enable us to monitor ground movements in real time and to estimate fault models of earthquakes including tsunami earthquakes and slow slip events. It can contribute to a tsunami warning system by forecasting tsunamis due to tsunami earthquakes precisely. |